01
有限时间一致性的实现通常需要执行机构具有较强的控制能力。然而,在实际物理系统中不可避免地存在输入饱和问题,如果控制器设计时忽略了输入约束,可能会导致控制性能下降甚至闭环系统失稳。因此,考虑输入约束的有限时间一致性问题研究具有重要的现实意义。
02
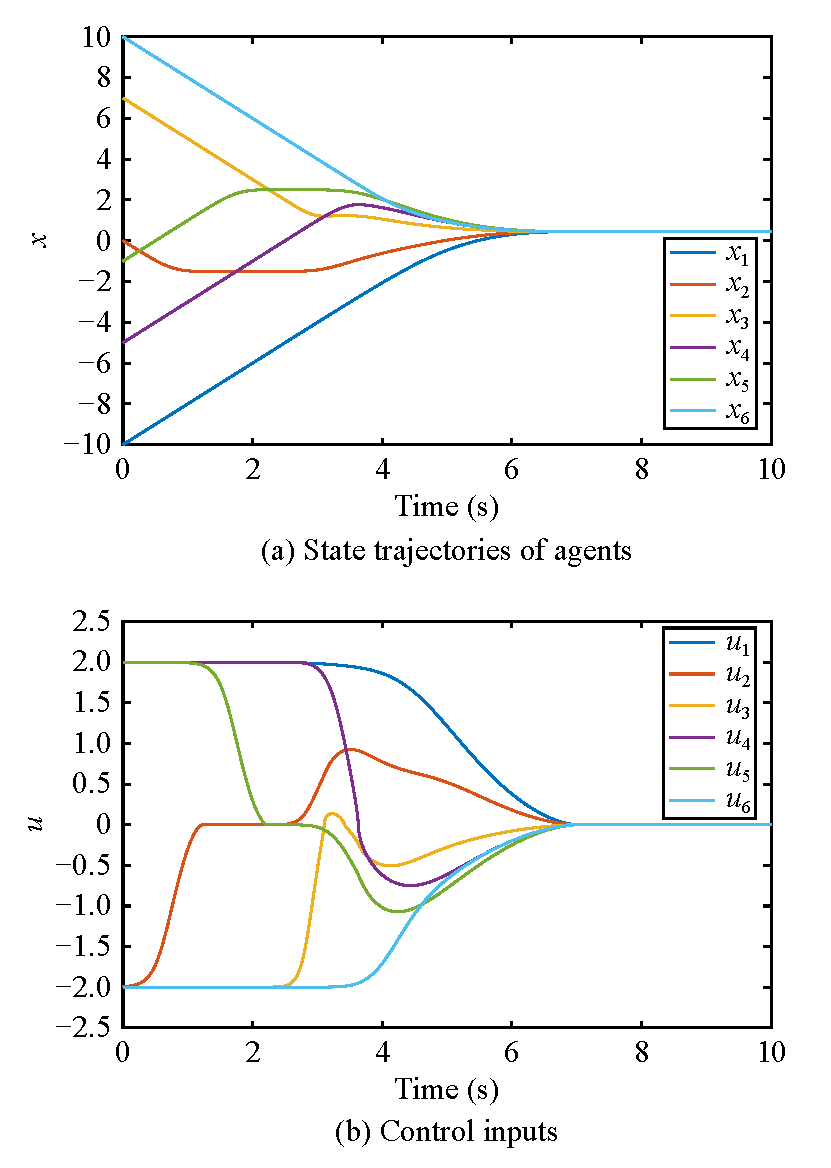
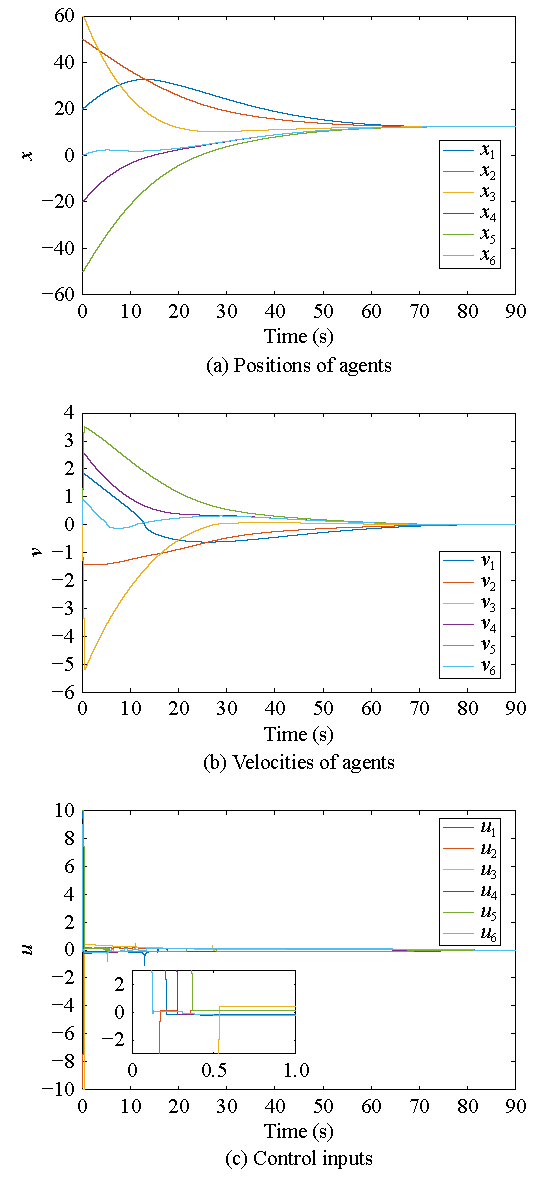
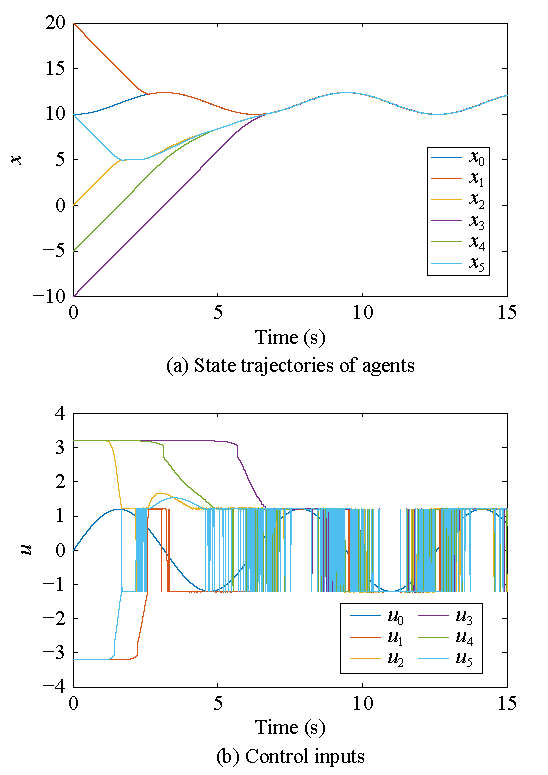
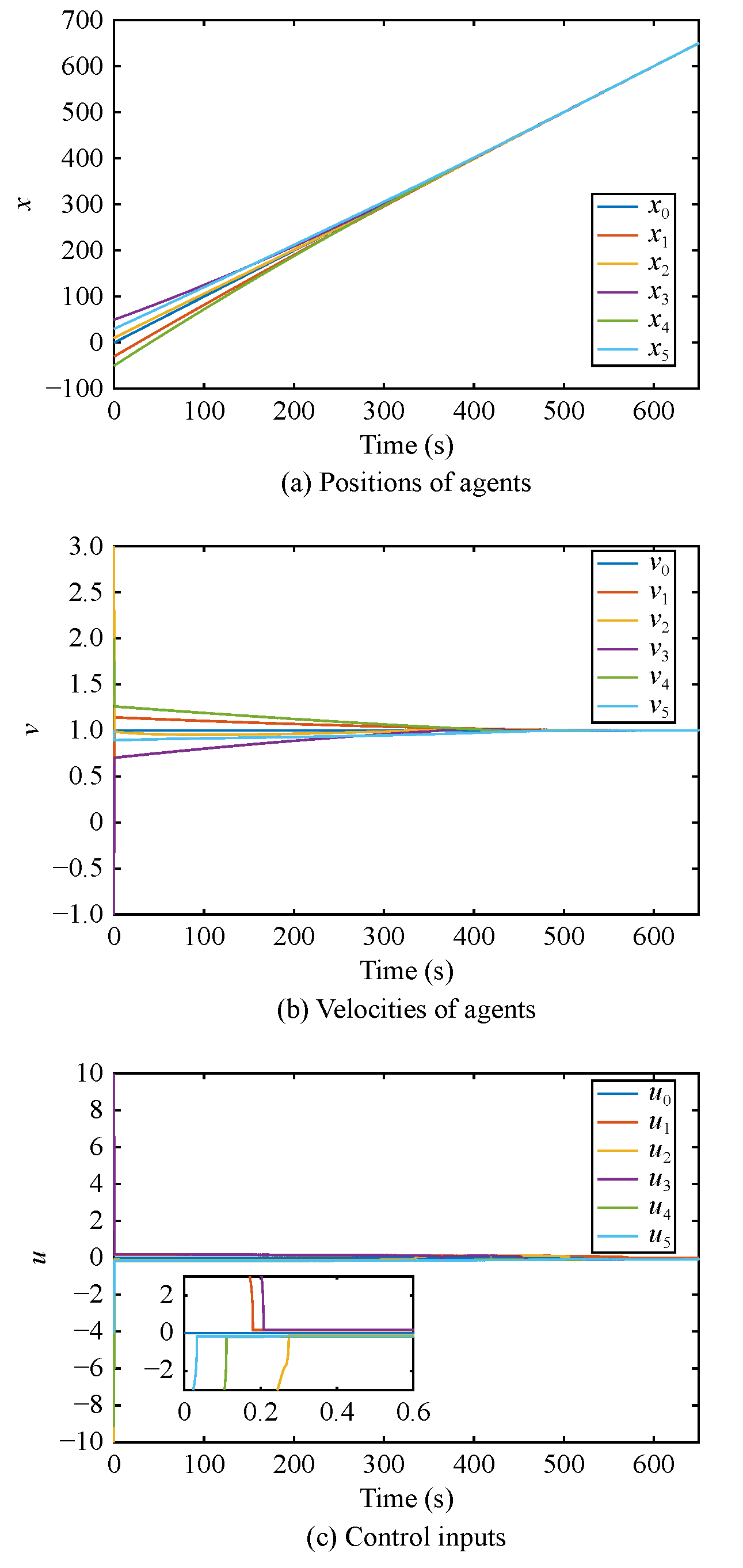
澳大利亚斯威本科技大学韩清龙教授和北京航空航天大学左宗玉教授团队提出了一种全新的基于双曲正切函数的多智能体一致性协议,有效解决了一阶、二阶多智能体系统的全局/半全局有限时间一致性问题。研究成果发表于IEEE/CAA Journal of Automatica Sinica 2024年第十一卷第六期:Z. Zuo, J. Tang, R. Ke, and
有限时间一致性的实现通常需要执行机构具有较强的控制能力。然而,在实际物理系统中不可避免地存在输入饱和问题,如果控制器设计时忽略了输入约束,可能会导致控制性能下降甚至闭环系统失稳。因此,考虑输入约束的有限时间一致性问题研究具有重要的现实意义。
02
澳大利亚斯威本科技大学韩清龙教授和北京航空航天大学左宗玉教授团队提出了一种全新的基于双曲正切函数的多智能体一致性协议,有效解决了一阶、二阶多智能体系统的全局/半全局有限时间一致性问题。研究成果发表于IEEE/CAA Journal of Automatica Sinica 2024年第十一卷第六期:Z. Zuo, J. Tang, R. Ke, and