01
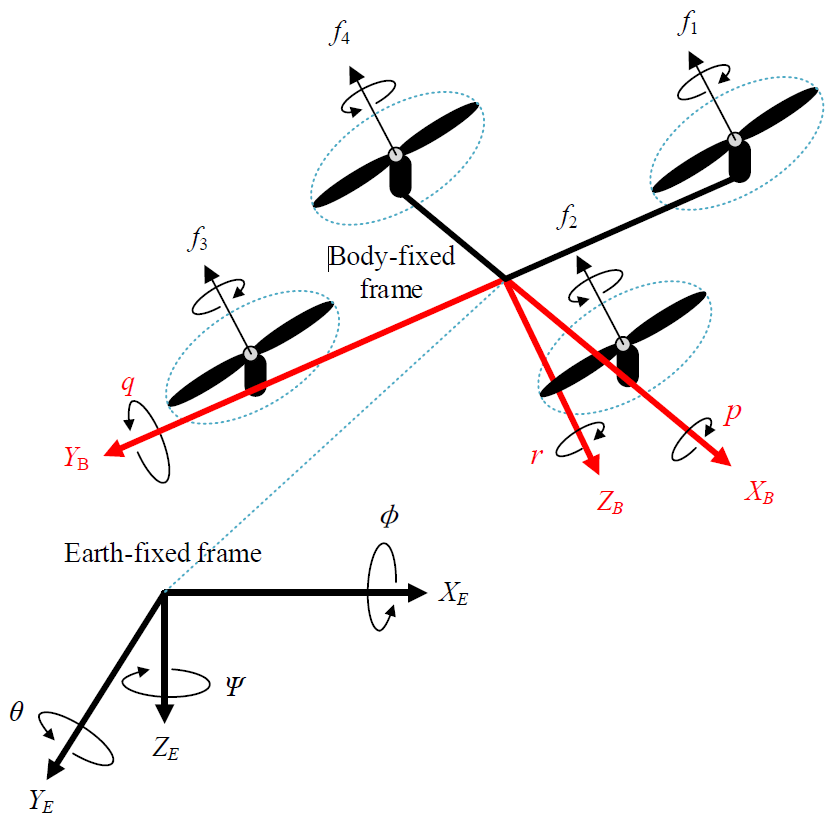
四旋翼无人机的姿态控制直接关系到其飞行性能和安全性能,一个有效的姿态控制系统能够使无人机具有更好的飞行品质、更精准的操作能力,也能够应对复杂多变的飞行环境,保证飞行安全。相比于传统的PID控制,最优姿态控制通过优化问题求解,得到精确的控制输入值,从而使系统在给定的性能指标下达到最佳性能。根据最优控制理论可知,最优姿态控制问题可转化为Hamilton-Jacobi-Bellman (HJB)方程的求解问题。然而,对于无人机这类高度非线性系统而言,HJB方程为典型的偏微分方程,难以直接求得其解析解。为解决该问题,强化学习算法应运而生,它通过试错学习的方式获得HJB方程的近似数值解,该方法现已被广泛应用于无人机的最优姿态控制领域。
虽然强化学习算法已成功用于解决无人机系统的最优姿态控制问题,但在实际任务场景中,系统状态不可能在无限空间范围内进行调整。此类安全约束已成为控制器设计过程中不可忽视的问题。例如,当无人机穿越狭窄走廊时,姿态角调整幅度过大或者速度过快时,可能导致无人机失控或与障碍物发生碰撞。此外,无人机在飞行过程中不可避免地受到各种不确定扰动的影响,如何抵消此类扰动对于控制器的影响也是亟待解决的问题。基于上述讨论,考虑状态约束和外部扰动下的四旋翼无人机保成本控制问题对于进一步完善基于强化学习的最优姿态控制具有重要的研究意义与应用价值。
02
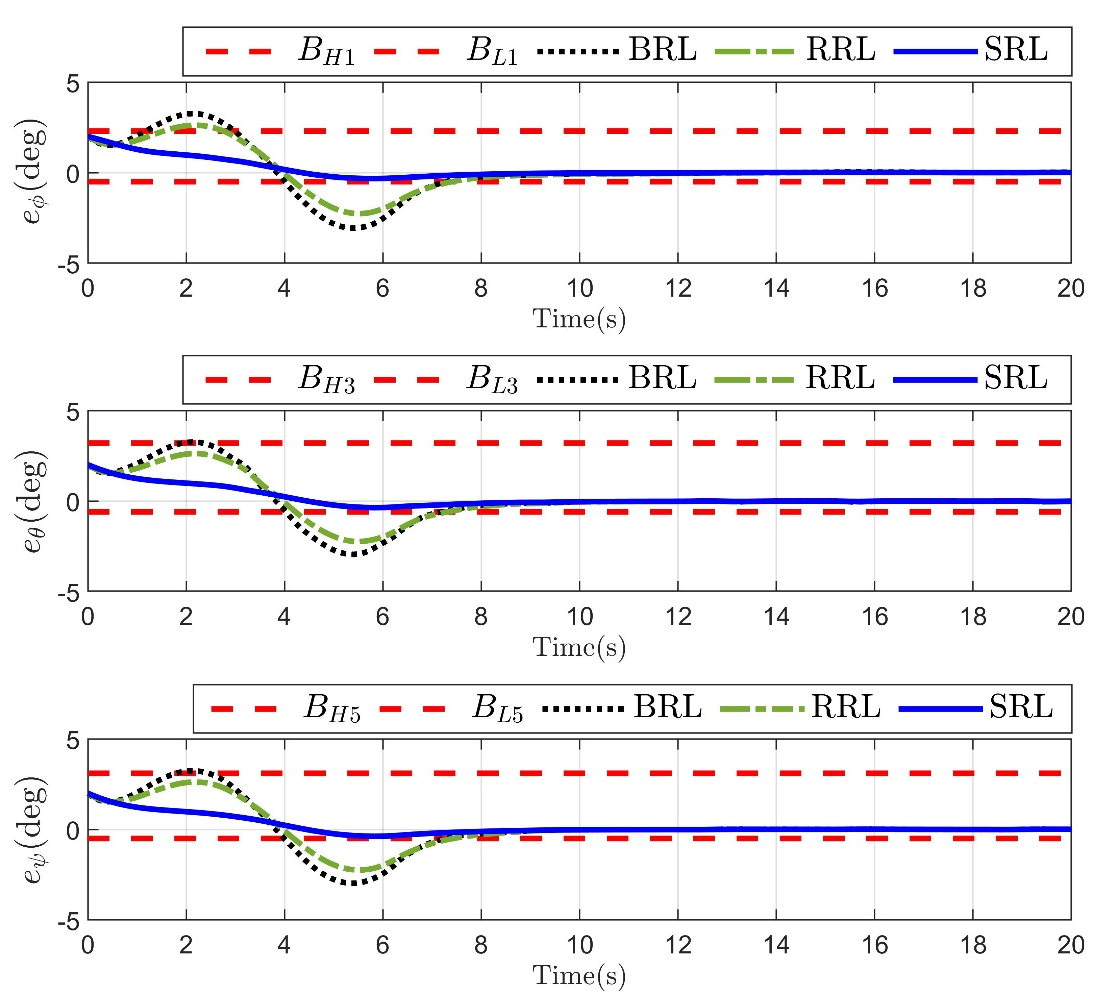
南京理工大学马倩教授团队与美国德克萨斯大学阿灵顿分校Frank L. Lewis教授团队合作提出了一种基于控制障碍函数和强化学习的保成本控制器设计方法,有效解决了外部扰动和非对称状态约束对四旋翼无人机最优姿态跟踪控制的影响。研究成果发表于IEEE/CAA Journal of Automatica Sinica第11卷第6期:Q. Ma, P. Jin, and
四旋翼无人机的姿态控制直接关系到其飞行性能和安全性能,一个有效的姿态控制系统能够使无人机具有更好的飞行品质、更精准的操作能力,也能够应对复杂多变的飞行环境,保证飞行安全。相比于传统的PID控制,最优姿态控制通过优化问题求解,得到精确的控制输入值,从而使系统在给定的性能指标下达到最佳性能。根据最优控制理论可知,最优姿态控制问题可转化为Hamilton-Jacobi-Bellman (HJB)方程的求解问题。然而,对于无人机这类高度非线性系统而言,HJB方程为典型的偏微分方程,难以直接求得其解析解。为解决该问题,强化学习算法应运而生,它通过试错学习的方式获得HJB方程的近似数值解,该方法现已被广泛应用于无人机的最优姿态控制领域。
虽然强化学习算法已成功用于解决无人机系统的最优姿态控制问题,但在实际任务场景中,系统状态不可能在无限空间范围内进行调整。此类安全约束已成为控制器设计过程中不可忽视的问题。例如,当无人机穿越狭窄走廊时,姿态角调整幅度过大或者速度过快时,可能导致无人机失控或与障碍物发生碰撞。此外,无人机在飞行过程中不可避免地受到各种不确定扰动的影响,如何抵消此类扰动对于控制器的影响也是亟待解决的问题。基于上述讨论,考虑状态约束和外部扰动下的四旋翼无人机保成本控制问题对于进一步完善基于强化学习的最优姿态控制具有重要的研究意义与应用价值。
02
南京理工大学马倩教授团队与美国德克萨斯大学阿灵顿分校Frank L. Lewis教授团队合作提出了一种基于控制障碍函数和强化学习的保成本控制器设计方法,有效解决了外部扰动和非对称状态约束对四旋翼无人机最优姿态跟踪控制的影响。研究成果发表于IEEE/CAA Journal of Automatica Sinica第11卷第6期:Q. Ma, P. Jin, and